








Commercializing university-originated medical, welfare, and life support technologies and energy ones that will realize a sustainable society.
First goal is social implementation
With a strong awareness of practicality and realization, this division aims not only to produce papers but also to commercialize technologies that create new value and open up new markets.
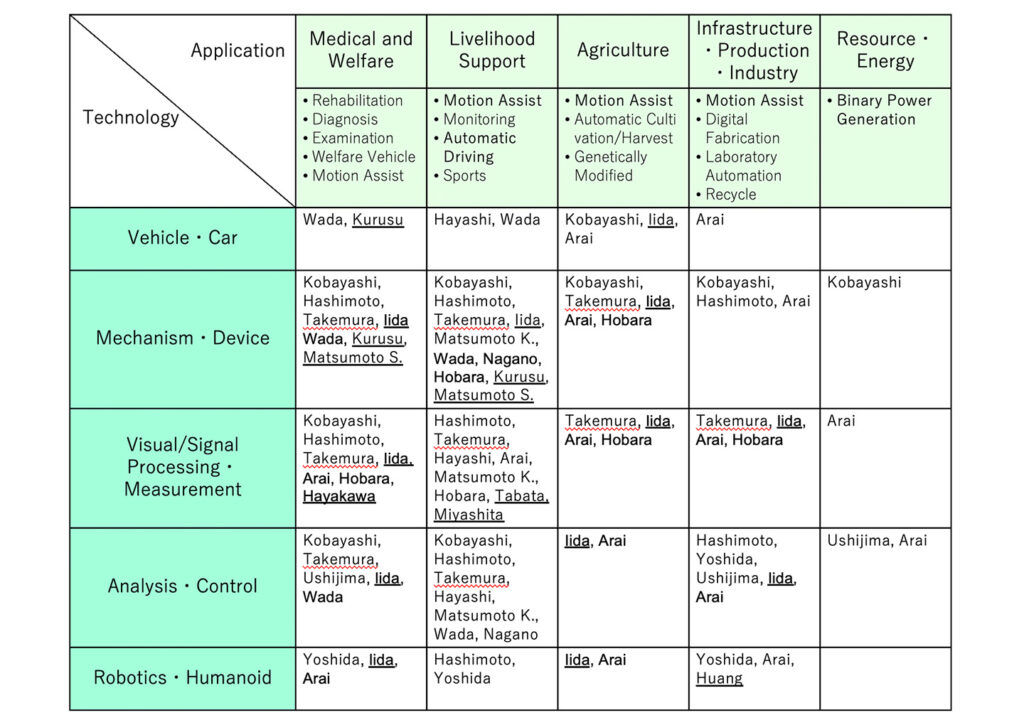
Therefore, as shown in the table below, we will combine the elemental technologies possessed by the contributors, actively collaborate with external organizations (participants from external organizations are underlined), and conduct collaborative research and development with an awareness of specific applications as an exit. is performed.
At the moment, there are only a few external organizations, but we will ask them to participate as needed according to the progress and strengthen cooperation beyond formality.
In addition, we will commercialize products and start ventures, and actively promote social development of new technologies originating from universities.
Compared to IT and materials/devices that spread rapidly around the world, the creation of “products” as “things”, especially as integrated systems of technologies that are directly related to our daily lives, has high risks and extremely poor cost performance.
For this reason, commercialization at universities tends to be generally avoided, but since universities are public institutions of society, we will propose new solutions to society in the form of “real things.”
Members and R&D content
Tbl. 1 shows the specialized classifications of the members and the specific items of applications that combine them. This field is mainly classified into (1) motion analysis/sensing (images/measurement and analysis in the table), (2) motion assistance/creation devices (mechanisms/devices and control in the table), (3) vehicles, and (4) field verification/evaluation.
(1) are KOBAYASHI, HASHIMOTO, TAKEMURA, IIDA, ARAI, HOBARA, HAYAKAWA, KASAI, USHIJIMA, HUANG, and YOSHIDA; (2) are WADA, KOBAYASHI, HASHIMOTO, TAKEMURA, IIDA, and HOBARA; MATSUMOTO and KASAI each specialize.
For example, (1) A. Precise walking motion analysis device and B. Swallowing sensor, (2) C. Assist device and prosthetic arm/leg, and (3) D. Highly intuitive operation interface and omnidirectional mobile device. We will create various deliverables by consolidating each knowledge. The details are described below.
KOBAYASHI, TAKEMURA, and HOBARA will lead the development of a sensor that extracts the three-dimensional displacement of the body during walking and the rotation angle around three axes with high accuracy.
YOSHIDA, MIYASHITA, TABATA, and HUANG link the movement of the whole body with dynamic models and image analysis.
Accurate walking motion data of healthy and non-healthy subjects will be accumulated, tools will be prepared to quantitatively indicate changes after diagnosis and treatment, and practical application and commercialization will be examined.
KURUSU and MATSUMOTO will acquire data at the clinical site.
In B, HASHIMOTO will lead the development of a swallowing sensor to determine the presence or absence of aspiration in daily life and to encourage early rehabilitation intervention.
Currently, we are researching a unique sensing technology that can simultaneously measure body sounds, muscle activity, and laryngeal elevation during swallowing using a piezo film.
In addition, together with KOBAYASHI, we are developing a robot simulator to clarify the swallowing mechanism, and we can make use of the knowledge obtained.
In addition, Iida’s world-leading soft robotics technology will be used to develop sensor devices with high biocompatibility and no discomfort when worn.
KURUSU and MATSUMOTO conduct evaluation experiments in clinical settings to evaluate the practicality of the medical and welfare equipment described above.
In addition, by providing feedback to each group, the development for practical use can be advanced efficiently.
KOBAYASHI, TAKEMURA, and HOBARA have already put C into practical use.
WADA, HAYASHI, and NAGANO are the main members of D, and conduct research and development on the design and control of mobile units and related systems that support the mobility of people with disabilities and the elderly.
It integrates elemental technologies such as electric motor control technology that realizes the movement of mobile objects, comfortable and intuitive control interface, self-position recognition and route planning technology for mobile objects, remote control, automatic driving/navigation technology, and so on.
Furthermore, by further expanding the application range of the original technology “Active Caster” developed for the omnidirectional movement system, we will consider practical application to wheelchairs and senior cars using practical mobile robot technology.
Target results
In accordance with the progress of research and development, we will periodically review specifications, prioritize them, roadmap for commercialization, and new developments. We will operate with the goals of 1 new product launch/year, 1 start-up venture/year, and 3 patent applications/year.