








Commercializing university-originated medical, welfare, and life support technologies and energy ones that will realize a sustainable society.
First goal is social implementation
This division places a strong emphasis on practicality and realization, and aims to go beyond papers and commercialize technologies that create new value that will open up new markets. To that end, it combines the component technologies of its members, actively collaborates with external organizations, and conducts collaborative research and development with an awareness of concrete applications as an exit point. As a result, it will commercialize products and launch startups, and actively promote the social deployment of new university-originated technologies.
To date, it has launched startups, commercialized products, and filed patent applications every year, and was selected for NEDO’s “Recycling Technology Research and Development Project to Build a Highly Efficient Resource Circulation System.” It has also created a living lab environment and begun using it as a shared facility across organizations.
Startup Establishment
Two starups have established so far: Core Health Co., Ltd. in 2023 and Beyond Optical Technologies Co., Ltd. in 2024, and have been certified as university-based startup companies.
[CoreHealth Co., Ltd.]
Founded by Prof. Hiroshi Kobayashi in September 2023. The lumbar support device Muscle Suit, sold by Innophys, a university-certified startup also founded by Kobayashi in 2013, is sold in 22 countries around the world as an assist device. On the other hand, by simply wearing the Muscle Suit and moving for about one minute, it can be used for “healthcare” by increasing the range of motion of the hip joint, correcting the tilt of the pelvis, opening the rib cage, and resulting in improved posture and easier walking, as well as training inner muscles that are not easily strengthened. CoreHealth Co., Ltd. aims to popularize healthcare that can only be achieved with such muscle suits, and as of June 2025, 18 units are being used in nine facilities nationwide.
[Beyond Optical Technologies Co., Ltd.] Fig.1
Founded by Prof. Yutaka Takemura in November 2024. Certified as a venture company spun out of Tokyo University of Science. Established to widely return research results to society. Utilizing near-infrared hyperspectral imaging endoscope technology developed by Takemura’s research group ahead of the rest of the world, it has become possible to non-destructively inspect and visualize deep tissues and foreign objects that could not be seen by the human eye until now. This innovative technology aims to provide new value to medical and industrial sites and realize a safe and secure future through non-destructive inspection technology. The company utilizes optical technology to provide equipment and technology that enables non-destructive inspection and image analysis using visible light and near-infrared hyperspectral imaging for a wide range of environments and objects, from narrow spaces and objects 1 mm square to structures of about 1 m, and is expected to be applied in a wide range of fields.
◆Living Lab: Fig. 2
A simulation laboratory equipped with a full range of living environments that can be used in real life, including a wheelchair-accessible kitchen, living room, dining room, bedroom, bathroom, toilet, and stairs. Motion capture equipment is also installed, and it is being used as a shared facility for research by members of this department (measuring daily activities, verifying the operation of life support robots, etc.). It is also used for industry-academia collaboration (verifying and advising on developed nursing robots) and education (practical classes such as an introduction to design thinking).

Fig.1 Near-infrared hyperspectral imaging Fig.2 Living laboratory
NEDO: “Research and development project for recycling technology to build a highly efficient resource circulation system”: Fig. 3
Kobayashi, Hashimoto, Takemura, Arai, Hayashi, Hayakawa, Wada, and Nagano are participating. This is a 1 billion yen project (responsible part) for five years starting from FY2023, and we are developing a fully automated device that picks up small waste home appliances piled up in scrap yards, sorts them, and recovers resources. So far, the project has progressed according to schedule and has been highly evaluated.
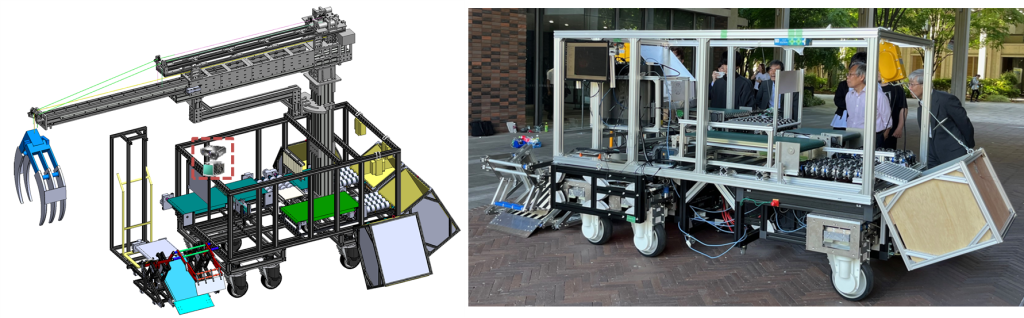
Fig.3 Small-sized waste home appliance fully automatic identification vehicle